Shengcheng Luo | 罗盛成
Ph.D. Candidate | Robotics / Tactile Sensing / Dexterous Manipulation
I am a Ph.D. candidate at ShanghaiTech University SIST (School of Information Science and Technology) and the Beijing Institute for General Artificial Intelligence (BIGAI), co-supervised by Prof. Chenxi Xiao and Prof. Ziyuan Jiao.
I hold a B.Sc. from ShanghaiTech and a M.Sc. from University of Aizu under Prof. Yong Liu’s supervision, and previously spent two years at Shanghai Jiao Tong University’s MVIG Group working with Prof. Cewu Lu.
I’m particularly interested in the intersection of robotics and AI, my research focuses on dexterous manipulation, tactile sensing, and end-effector design to enable robots to interact with the physical world with human-like precision and adaptability. My contributions have been recognized with Best Paper Finalist and Best Paper on Human-Robot Interaction of ICRA.

Photo credit: Haoyang Wang, Atlanta.
news
| Apr 24, 2025 | Our paper “Human-Agent Joint Learning for Efficient Robot Manipulation Skill Acquisition” has been selected as best paper award on Human-Robot Interaction and best paper finalist for main conference by ICRA 2025! |
|---|---|
| Jan 28, 2025 | Our paper “Human-Agent Joint Learning for Efficient Robot Manipulation Skill Acquisition” has been accepted by ICRA 2025. |
| Jul 01, 2024 | Our paper “DISCO: Embodied Navigation and Interaction via Differentiable Scene Semantics and Dual-Level Control” has been accepted by ECCV 2024. |
selected publications
- ICRA 2025
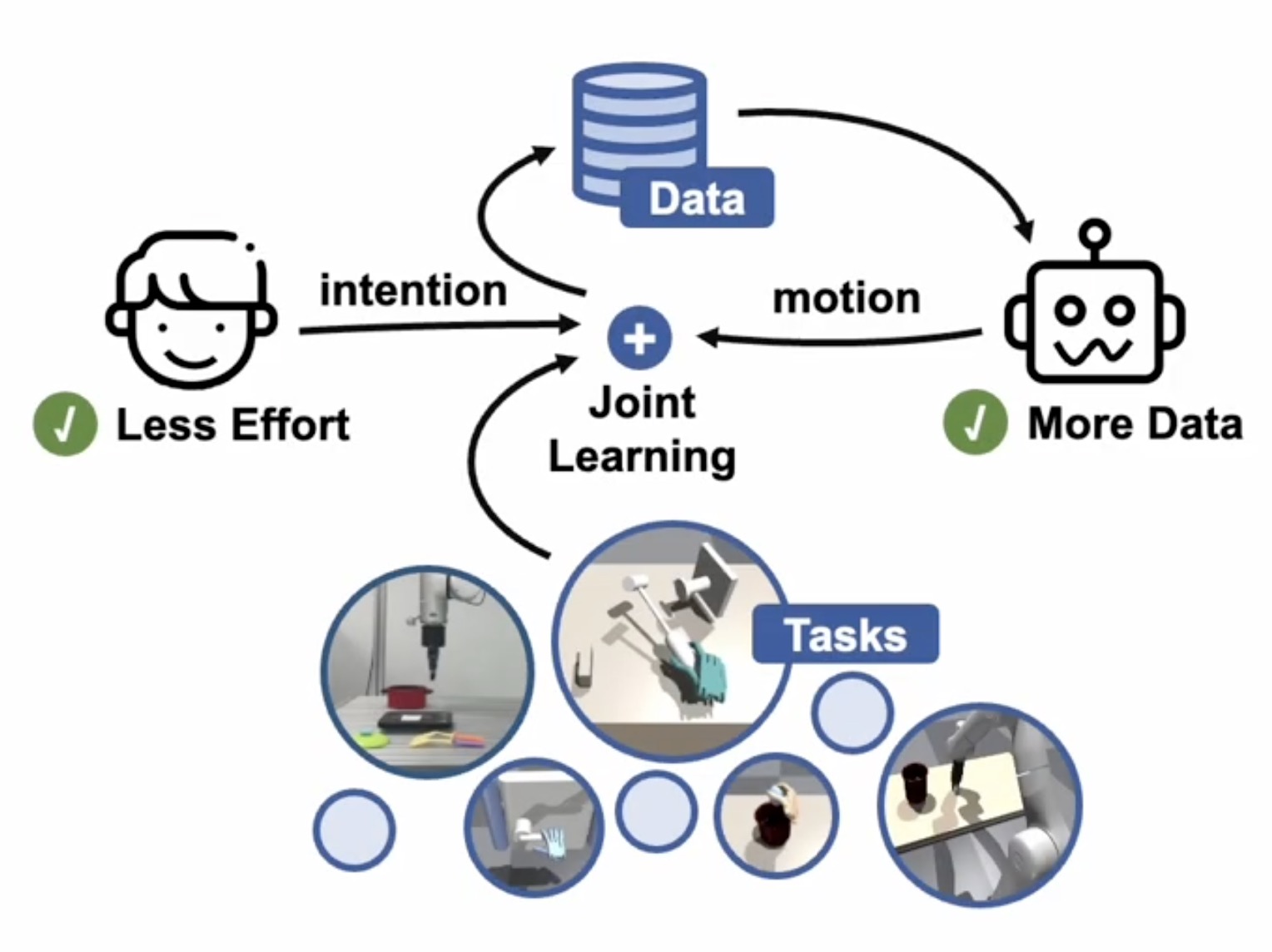 Human-Agent Joint Learning for Efficient Robot Manipulation Skill AcquisitionIn International Conference on Robotics and Automation, 2025
Human-Agent Joint Learning for Efficient Robot Manipulation Skill AcquisitionIn International Conference on Robotics and Automation, 2025